JOURNAL PUBLICATIONS, CONFERENCE PRESENTATIONS AND THESIS REPORTS
(Please click the project images to access the technical reports/PPTs/Repositories for each project)
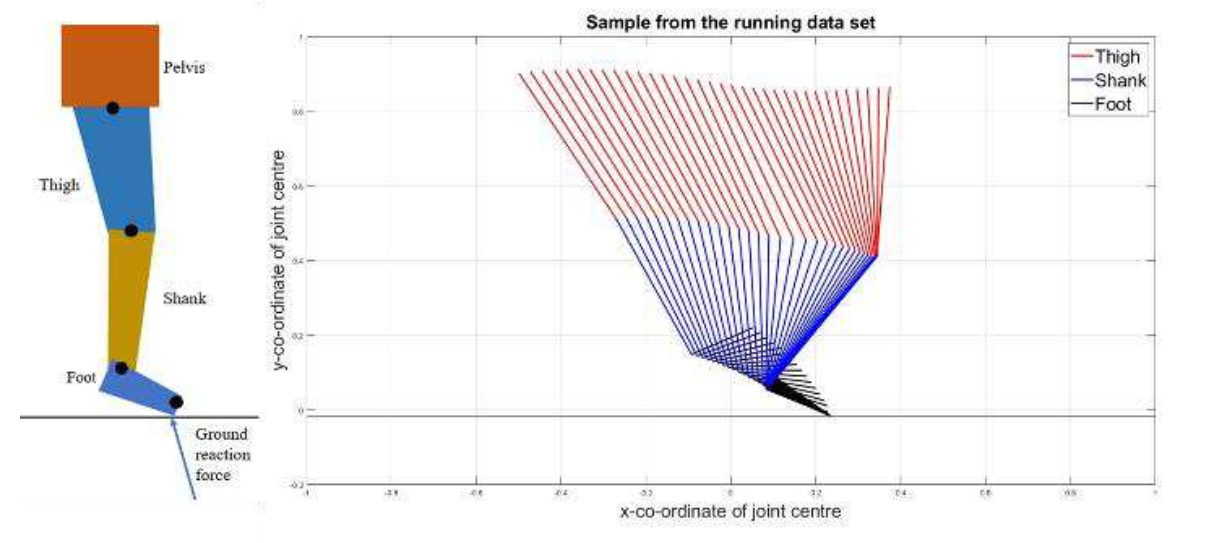
Journal Publication in ASME Journal of Mechanisms and Robotics: Enhanced Euler-Lagrange Formulation for Analyzing Human Gait with Moving Base Reference
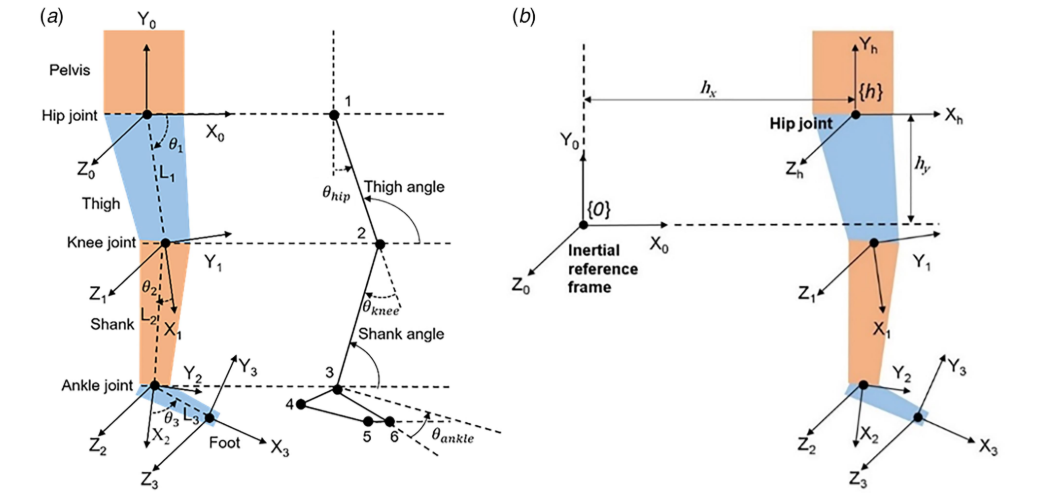
Conference Presentation at the 6th Joint International Conference on Multibody System Dynamics and 10th Asian Conference on Multibody Dynamics: Modelling and Validation of Human Gait Dynamics using Modified Euler-Lagrange Approach
Mini-Thesis: Semi-Analytical Approach - Virtual Control System Design and Loads Verification for a multi-body model of a bike

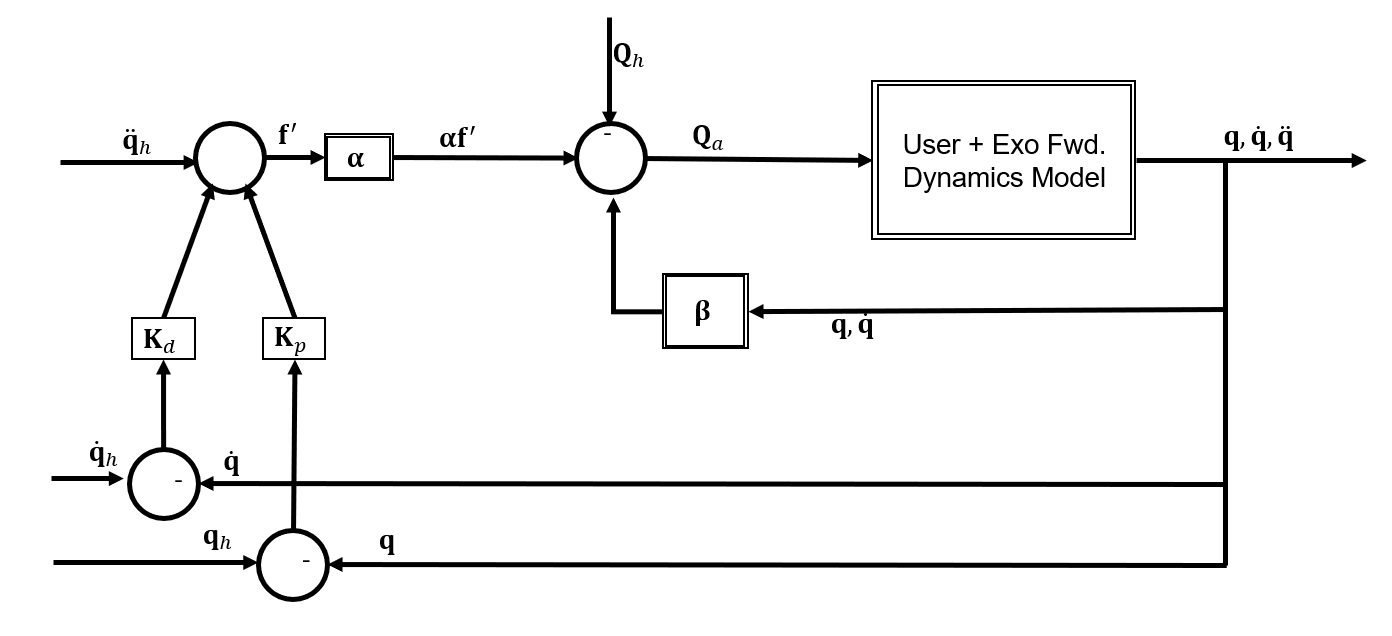
Conference Presentation/Proceedings at the 6th International Conference on Advances in Robotics, July 2023: Estimation of Ground Reaction Force for Coupled Dynamic Modelling and Control of Lower-Limb Exoskeleton
Bachelor Thesis: Design and Analysis of Propellers for Slow-Flyer Quad-Copters

Master Thesis Front Page & Abstract (Content is NDA Protected till 2028)